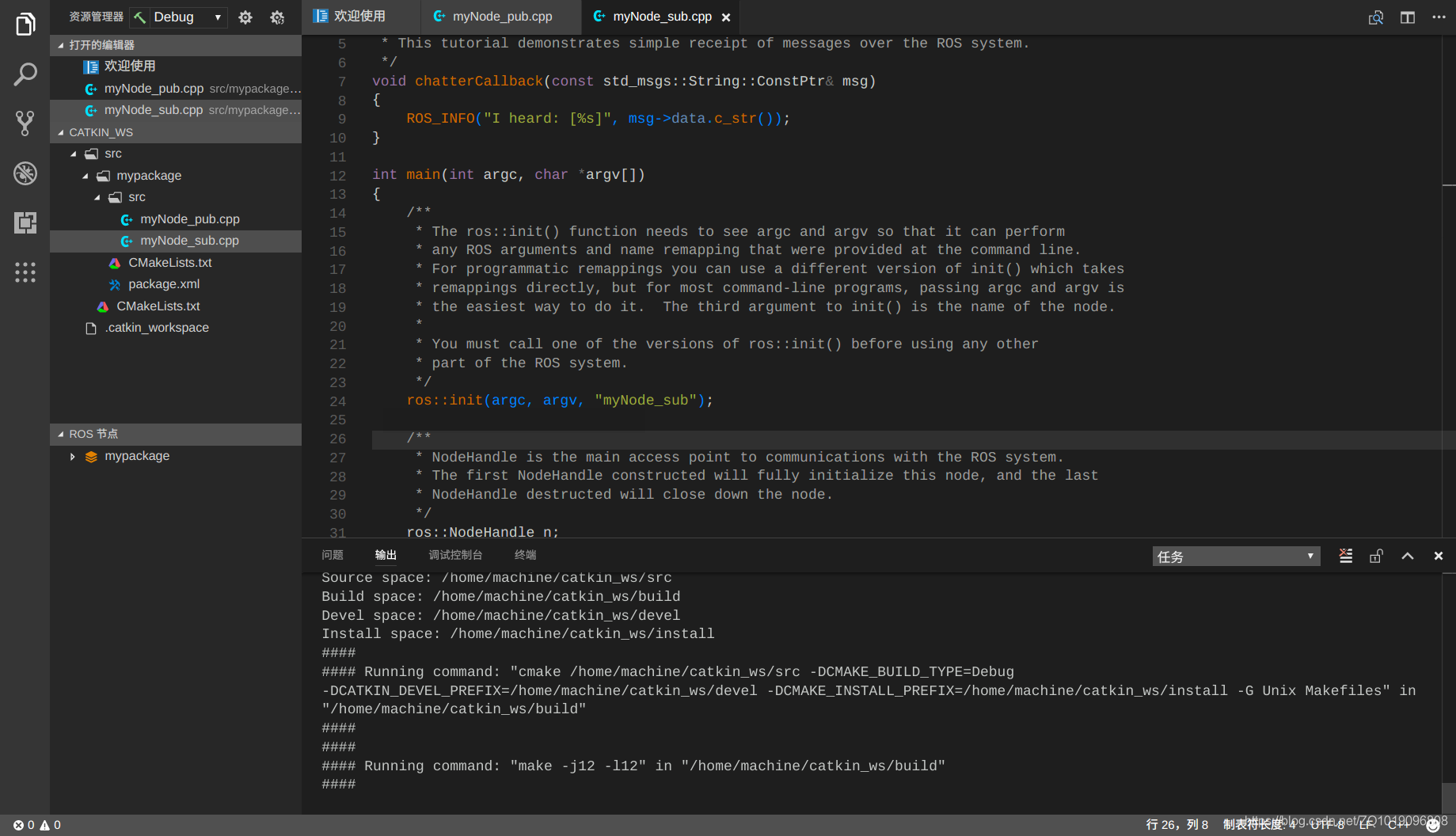
本人目前研一在读,学习ROS机器人也有半年多了,开此博客决定把ROS学习从新捋一遍.目前使用Ubuntu 16.04 + ROS-Kinetic。 电脑选择这个教程: 出现下面这个样子就算是启动成功了 百度网盘下载:提取码:c2jk 然后点击左上角小锤子右边的下拉菜单,选择Debug。点击绿色小锤子进行build。构建完成后界面。 可以看到pub节点一直在发送hello world 在mypackage上右击,选择“Add C++ Class”输入类名myclass,回车选择myNode_sub. 打开CMakeList.txt,把 替换为 编译通过后就可以写自己需要功能的类的实现了。 总体来说,roboware还是比较好用的,新建文件,添加依赖等界面上操作位,对应的cmake文件会自动改变,可以避免自己配置出现的低级错误。但是在使用过程中发现这个软件还有一些bug。有些文件新建后不能更新到工程目录下,需要重新启动才可以。类的添加后cmake文件中与头文件相关的内容不会自动更新,需要手动更改等。
0.前言
1.ROS安装
ROS安装教程
树莓派可以直接下载我的镜像
Ubuntu16.04+Kinetic 用户名:star 密码:123456
安装完成后要测试是否安装正确,运行以下命令:roscore started roslaunch server http://machine-G7M:46523/ ros_comm version 1.12.14 SUMMARY ======== PARAMETERS * /rosdistro: kinetic * /rosversion: 1.12.14 2.ROS开发IDE安装(roboware studio)
树莓派是安装不了的,可以拿电脑当主机远程部署开发
下载完成后是deb的包,使用以下命令安装:sudo dpkg -i roboware-studio_1.1.0-1514335284_amd64.deb 3.创建一个ROS工作空间
选择路径和输入工作空间名称
 在src上右击,选择“Add ROS Package”输入包的名称mypackage .
在src上右击,选择“Add ROS Package”输入包的名称mypackage .
在mypackage上右击,选择“Edit ROS Package Dependencies”,输入“roscpp std_msgs”,代表这个包依赖roscpp和std_msgs。
在mypackage上右击,选择“Add C++ Node”输入myNode,回车。这时src下面出现两个cpp文件,一个myNode_pub,一个myNode_sub。分别修改两个CPP文件节点名称ros::init(argc, argv, "myNode_pub"); ros::init(argc, argv, "myNode_sub");
 选择terminal,右上角的加号可以新建终端,这里需要3个终端,
选择terminal,右上角的加号可以新建终端,这里需要3个终端,
分别运行:roscore #启动ros source devel/setup.bash rosrun mypackage myNode_pub source devel/setup.bash rosrun mypackage myNode_sub
 sub节点一直在接受:I heard: hello world
sub节点一直在接受:I heard: hello world
4.在ros中添加新建自己的类
然后在myNode_sub.cpp中添加包含文件#include "myclass.h" include_directories( include ${catkin_INCLUDE_DIRS} #include # ${catkin_INCLUDE_DIRS} ) include_directories( include ${catkin_INCLUDE_DIRS} include/mypackage # ${catkin_INCLUDE_DIRS} ) 5.总结
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)









