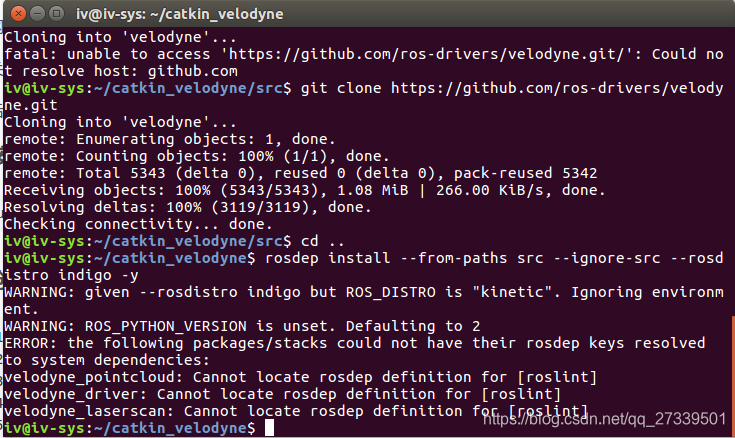
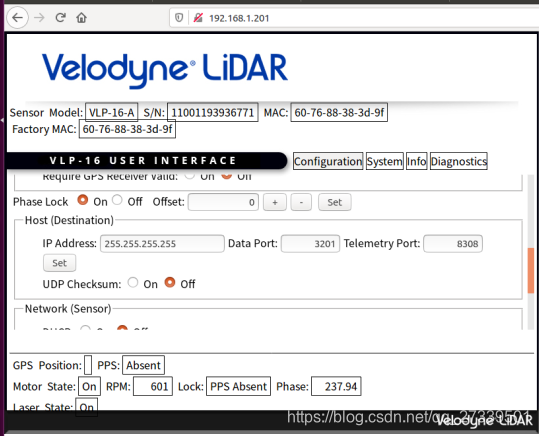
测试系统:ubuntu 16.04 (64位) 配置好本机有线连接的IP地址 在执行rosdep install –from-paths src –ignore-src –rosdistro indigo -y。报了一个错,如下: 解决方法:在https://github.com/ros/roslint上下载roslint,并将它放在/catkin_velodyne/src/路径下。重新运行该命令。 查看linux系统python版本: 激光雷达正常供电,与电脑通过网线连接。 (1)打开网页,网址处输入192.168.1.201 更改:将Fixed Frame:may改为velodyne; 即可显示点云图。 只保存/velodyne_points这个topic的数据,保存在当前目录的out.bag 保存当前所有topic的数据。
Ros版本:kinetic 1.传感器与电脑利用网线进行连接
(1)点击电脑右上角的网络标志,然后点最下面Edit Connections.
(2)点击Add,添加Ethernet。

(3)将connection name改为velodyne,method:Manual。
(4)更改IPv4 Settings
Addresses:(Address:192.168.1.77;Netmask:255.255.255.0;Gateway:192.168.1.1)

最后保存即可。2.安装ROS依赖
sudo apt-get install ros-kinetic-velodyne 3.创建ROS工程
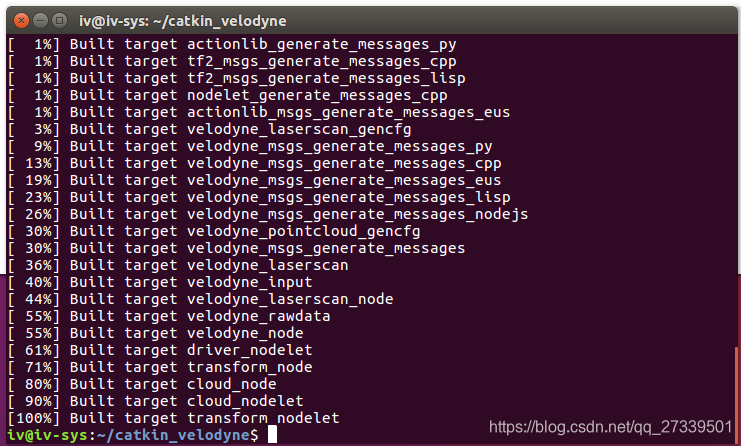
mkdir -p catkin_velodyne/src cd catkin_velodyne/src git clone https://github.com/ros-drivers/velodyne.git cd .. rosdep install --from-paths src --ignore-src --rosdistro indigo -y catkin_make source devel/setup.bash
然后编译成功(注:ROS必须在python2中执行)
(编译过程中报了一个错,说no module named rospkg)
需要添加rospkg模块,执行命令pip install rospkg
python --version
linux python版本切换(改成2就对应写Python2,改成3就对应写python3):echo alias python=python2 >>~/.bashrc soure ~/.bashrc 4.连接好设备
5.运行并查看数据
激光雷达参数页面:
(2)在catkin_velodyne目录下打开终端,输入命令:roslaunch velodyne_pointcloud VLP16_points.launch 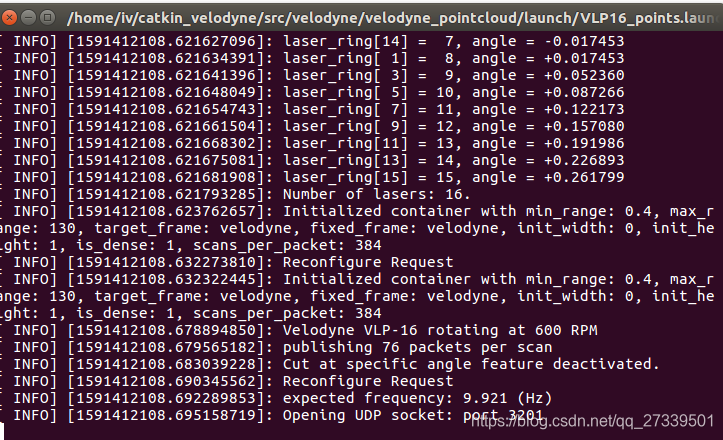
(3)打开rviz,查看3D数据,在catkin_velodyne目录下重新打开一个终端,输入命令rviz 
添加Add——pointcloud2——By topic——/velodyne_points.
并将catkin_velodyne——src——velodyne——velodyne_pointcloud——launch——VLP16_points.launch文件中的第14行2368改为3201.

6.记录数据
rosbag record -0 out /velodyne_points
用rostopic list -v查看当前可用的topicrosbag record -a out /velodyne_points
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)









