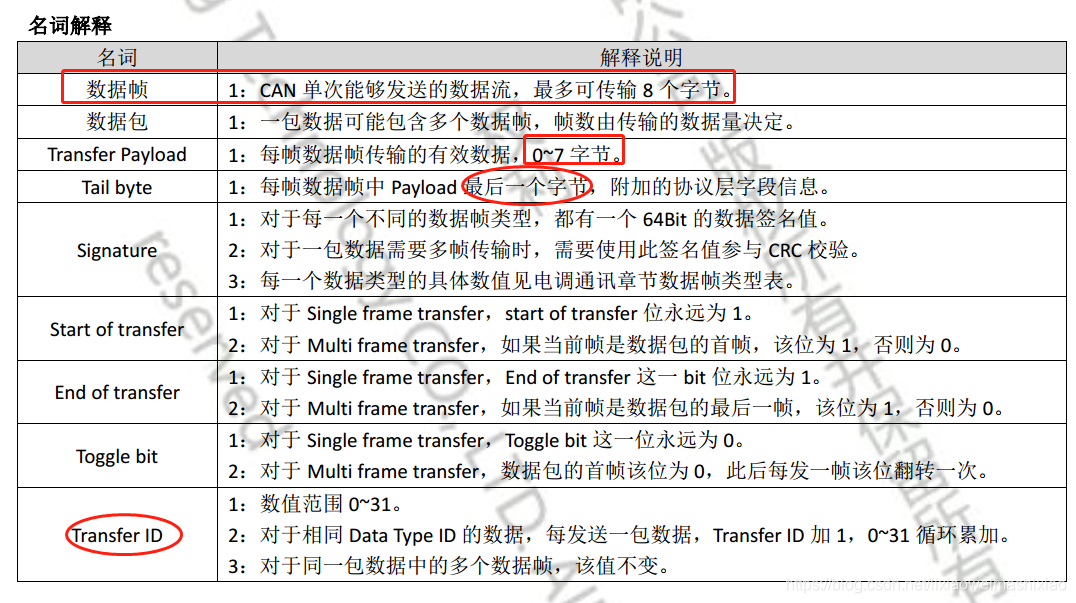
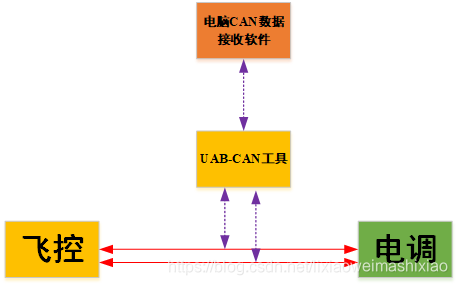
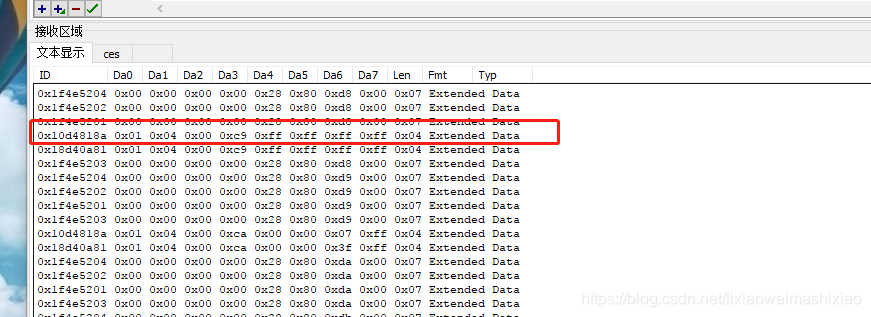
本节主要记录如何通过ardupilot的uavcan来实现一个Service帧信息,进而配置UAVCAN电调。有问题可以一起交流@18129927205 还记得一个数据帧有Message帧(广播)和Service帧(非广播),这里我们重点学习如何创建Service帧。在创建Service帧时,需要创建客户端和服务器,这里的客户端指的是请求方,服务器指的是应答方。 在目录ardupilot/modules/uavcan/dsdl/uavcan/protocol中定义如下文件,注意文件名的含义(212是我们的Node ID不是CAN ID )。 在目录ardupilot/modules/uavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl/uavcan/protocol中定义如下文件,注意文件名的含义。 4. setup_canbus(); 5. _var_info_can_protocol[i]._uavcan->try_init() == true 到这里进入核心初始化代码,在文件目录ardupilot/libraries文件下找到AP_UAVCAN文件夹会看到AP_UAVCAN.cpp和AP_UAVCAN.h文件。 1》增加头文件 备注:这个文件是在编译时自动生成的Led.hpp,文件来源于我们定义的212.Led.uavcan那个文件 2》增加客户端函数和控制函数 3》初始化客户端和回调函数 到这里初始化函数基本完成,对于控制函数可以暂时不写,如果你想接收服务器端的数据过来,可以在控制函数中进行解析收到的服务器数据。 重点两个函数需要分析:init()和call()函数 可以看出publisher属于PublisherType publisher_;的一个对象,PublisherType属于ServiceClient的一个私有模板数据成员 而typedef GenericPublisher<DataType, RequestType> PublisherType;中的第二个参数RequestType,属于typedef typename DataType::Request RequestType; 我们分析下面这个函数 执行 注意这里面又两个函数 继续执行 建议这部分代码先不要深入研究,等用起来后再仔细分析。 重点函数: 重点分析一下几个函数 这个函数指的是哪个函数呢?还得的初始化时我们设置的回调函数吗? 这里面又四个参数:要弄明白这四个参数的含义 这个函数主要实现:1.判断服务节点是不是非广播,服务节点等于NODE ID吗,2.确定数据类型ID 3.确定传输ID 注意这个函数:dispatcher_.send(frame, tx_deadline, blocking_deadline, qos_, flags, iface_mask_); 这里面有两个函数需要注意。 这个函数很重要,是形成CAN ID 字段的关键,如果前面没有设置对,在这里打印检测也可以定位问题。 核心底层接口函数sendToIface(i, frame, tx_deadline, flags); 到这里基本实现了把服务帧数据发送出去。 所谓工欲善其事必先利其器,我们最好买个USB-CAN 模块方便实时监控我们发的和收到的数据是否正常,接线方式可以见下面的方式。
目录
文章目录
摘要
1.初始化一个Service 请求数据帧

这里我们通过飞控配置电调的指示灯,首先看下电调指示灯配置文档,如下图。
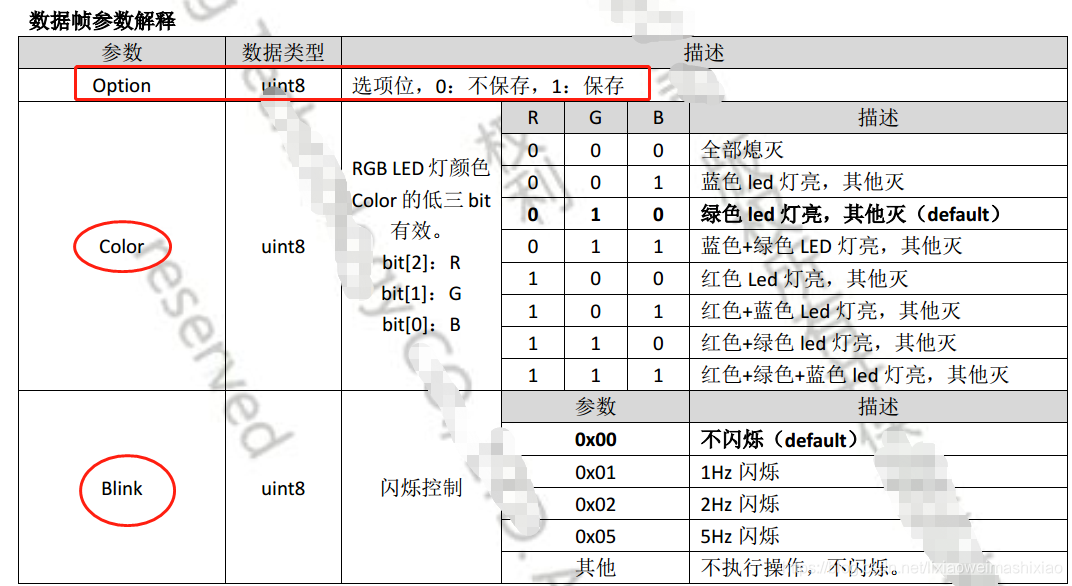

这些就是我们要参考的文档知识。1.定义UAVCAN 驱动文件

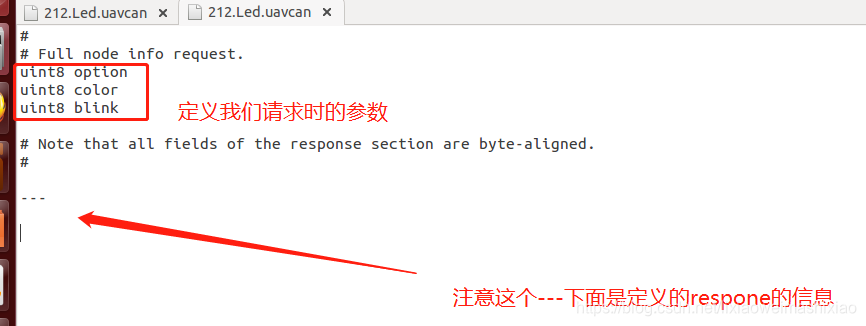
注意两个文件完全一样,内容如下:
2.初始化驱动文件
void AP_BoardConfig_CAN::init() { for (uint8_t i = 0; i < MAX_NUMBER_OF_CAN_INTERFACES; i++) //最多支持两个can总线 { //_driver_number驱动号 _st_driver_number[i] = (int8_t) _var_info_can[i]._driver_number; //_can_debug调试号 _st_can_debug[i] = (int8_t) _var_info_can[i]._can_debug; } //初始化can总线 setup_canbus(); }
#include <uavcan/protocol/Led.hpp>
//定义LED控制函数 static void led_ctrl_Info(const uavcan::ServiceCallResult<uavcan::protocol::Led>& resp); //定义客户端函数 static uavcan::ServiceClient<uavcan::protocol::Led>* Led_Ctrl_client[MAX_NUMBER_OF_CAN_DRIVERS]; bool AP_UAVCAN::try_init(void) { //父类对象 if (_parent_can_mgr == nullptr) { return false; } //初始化OK吗 if (_initialized) { return true; } //对象初始化OK吗 if (!_parent_can_mgr->is_initialized()) { return false; } _uavcan_i = UINT8_MAX; for (uint8_t i = 0; i < MAX_NUMBER_OF_CAN_DRIVERS; i++) { if (_parent_can_mgr == hal.can_mgr[i]) { _uavcan_i = i; break; } } if(_uavcan_i == UINT8_MAX) { return false; } //获取结点 auto *node = get_node(); if (node == nullptr) { return false; } //结点初始化OK if (node->isStarted()) { return false; } uint8_t driver_index = _uavcan_i; uavcan::NodeID self_node_id(_uavcan_node); //设置节点ID=10 node->setNodeID(self_node_id); char ndname[20]; snprintf(ndname, sizeof(ndname), "org.ardupilot:%u", _uavcan_i); uavcan::NodeStatusProvider::NodeName name(ndname); node->setName(name); // Standard type uavcan.protocol.SoftwareVersion //标准型uavcan.protocol.SoftwareVersion协议 uavcan::protocol::SoftwareVersion sw_version; sw_version.major = AP_UAVCAN_SW_VERS_MAJOR; //1 sw_version.minor = AP_UAVCAN_SW_VERS_MINOR; //1 node->setSoftwareVersion(sw_version); //设置软件版本 uavcan::protocol::HardwareVersion hw_version; // Standard type uavcan.protocol.HardwareVersion //设置硬件版本1.0 hw_version.major = AP_UAVCAN_HW_VERS_MAJOR; hw_version.minor = AP_UAVCAN_HW_VERS_MINOR; node->setHardwareVersion(hw_version); //初始化节点 const int node_start_res = node->start(); if (node_start_res < 0) { debug_uavcan(1, "UAVCAN: node start problemnr"); } //初始化LED控制客户端 Led_Ctrl_client[driver_index] = new uavcan::ServiceClient<uavcan::protocol::Led>(*_node); if (Led_Ctrl_client[driver_index] == nullptr) { return false; } //初始化LED控制函数 int res = Led_Ctrl_client[driver_index]->init(); //调用Led Led_Ctrl_client[driver_index]->setCallback(led_ctrl_Info); //设置优先级 Led_Ctrl_client[driver_index]->setPriority(16); //设置服务节点是1 uavcan::NodeID service_res_node_id(1); uavcan::protocol::Led::Request request; request.option=1; request.color=1; request.blink=0; //直接调用 Led_Ctrl_client[0]->call(service_res_node_id,request); //直接调用 if (res < 0) { return false; } ...... **后续省略** ..... } 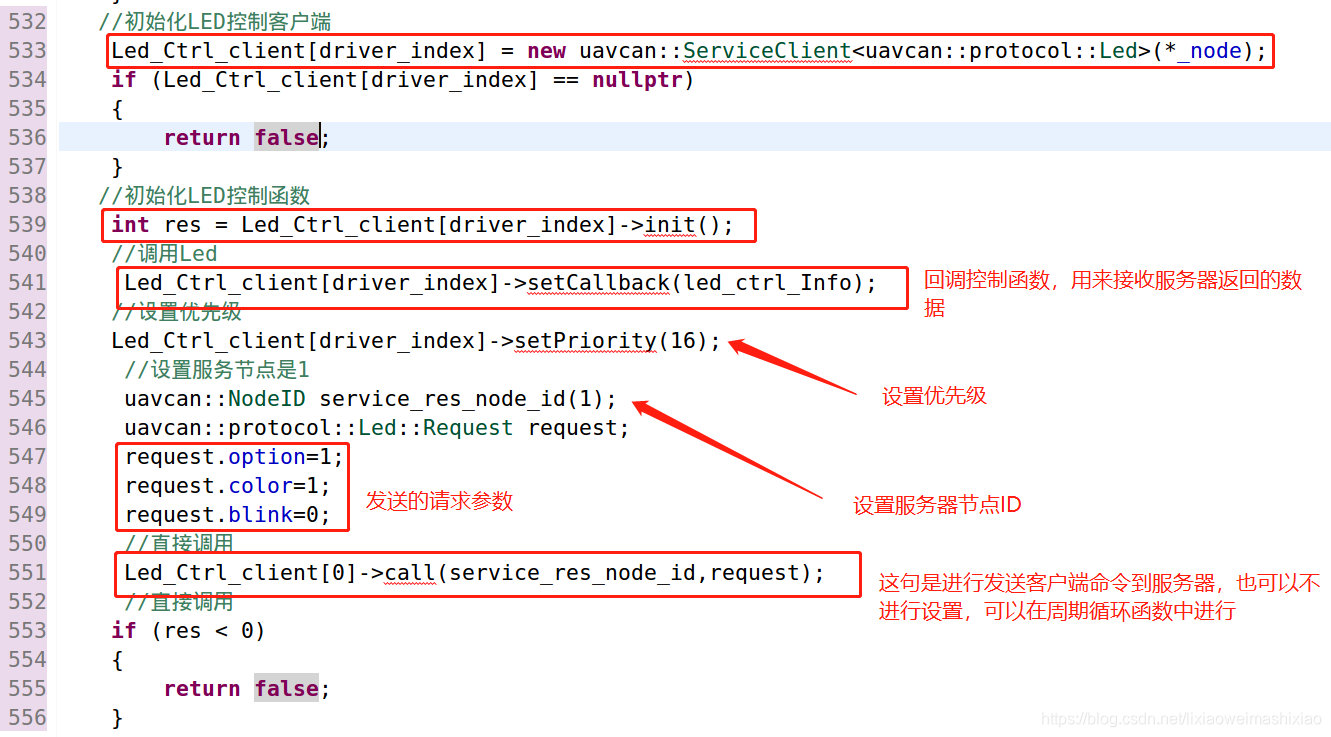
3.分析初始化函数
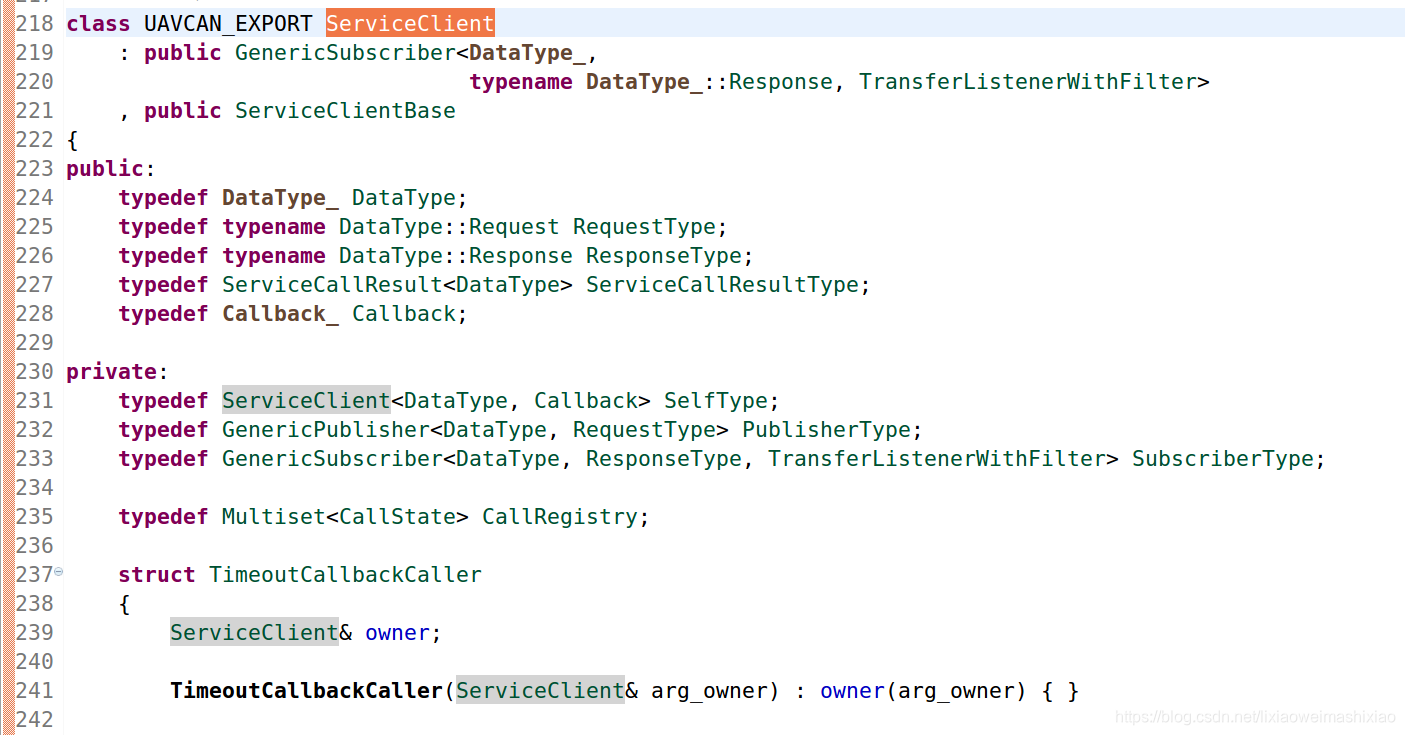
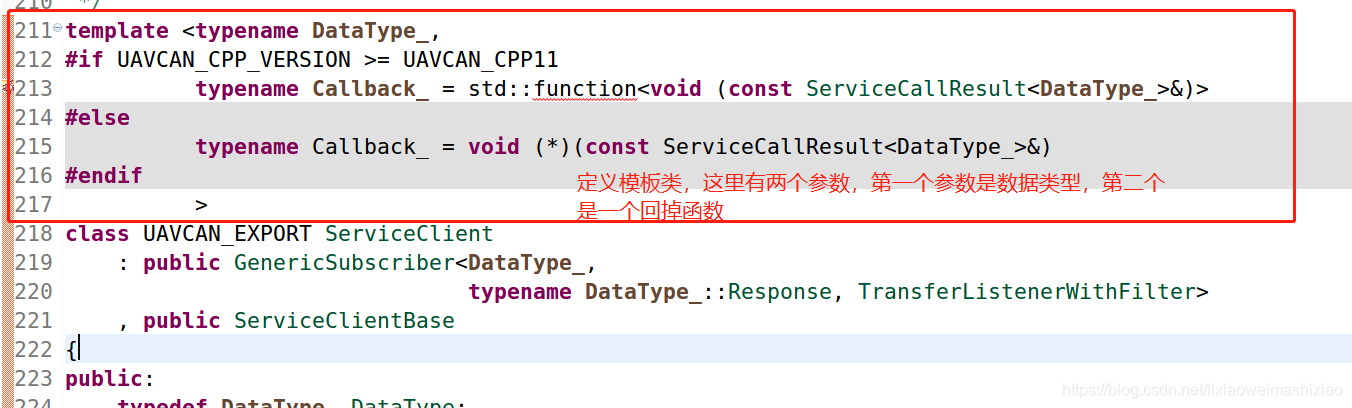
找到ardupilot/modules/uavcan/libuavcan/include/uavcan/node/service_client.hpp
可以找到这两个定义
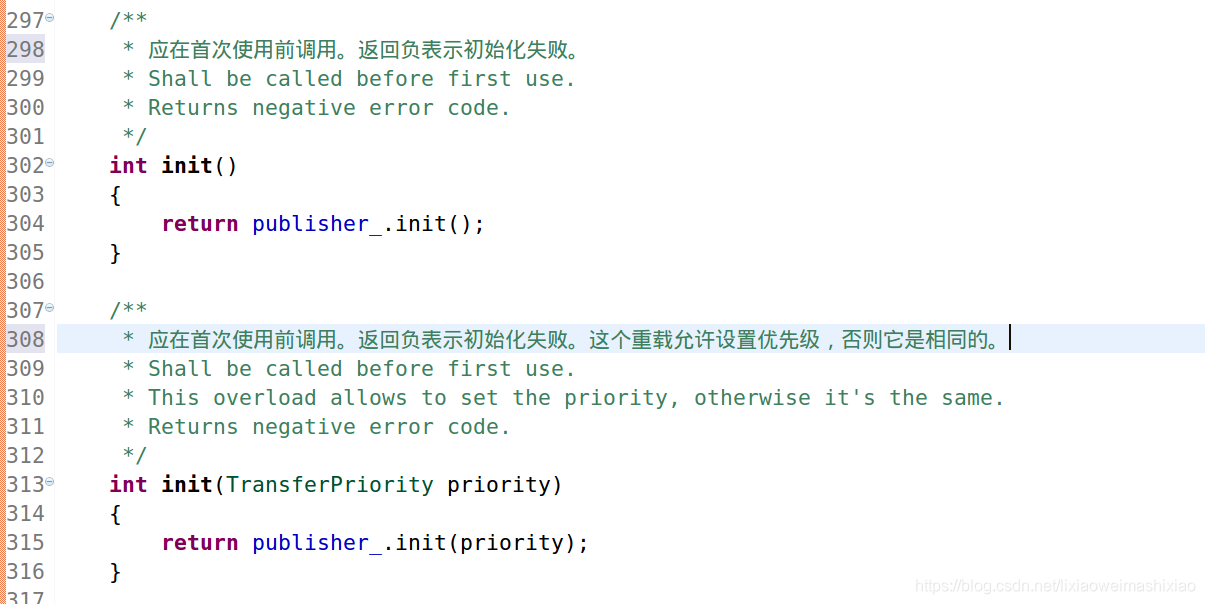
这里我们只先分析init函数,对应call我们在loop中进行分析 int init() { //PublisherType publisher_; return publisher_.init(); }

可以看出都是属于Request类型的 int init(TransferPriority priority) { return publisher_.init(priority); }
这个下面函数Init方法可以在第一次发布之前调用,但不必 因为发布服务器可以自动初始化。 int init() { return checkInit(); } template <typename DataSpec, typename DataStruct> int GenericPublisher<DataSpec, DataStruct>::checkInit() { if (isInited()) { return 0; } return doInit(DataTypeKind(DataSpec::DataTypeKind), DataSpec::getDataTypeFullName(), CanTxQueue::Qos(Qos)); } bool GenericPublisherBase::isInited() const { return sender_.isInitialized(); } int GenericPublisherBase::doInit(DataTypeKind dtkind, const char* dtname, CanTxQueue::Qos qos) { if (isInited()) { return 0; } GlobalDataTypeRegistry::instance().freeze(); const DataTypeDescriptor* const descr = GlobalDataTypeRegistry::instance().find(dtkind, dtname); if (descr == UAVCAN_NULLPTR) { UAVCAN_TRACE("GenericPublisher", "Type [%s] is not registered", dtname); return -ErrUnknownDataType; } //初始化 sender_.init(*descr, qos); return 0; } /** * 传送ID初始化 */ void TransferSender::init(const DataTypeDescriptor& dtid, CanTxQueue::Qos qos) { UAVCAN_ASSERT(!isInitialized()); qos_ = qos; data_type_id_ = dtid.getID(); crc_base_ = dtid.getSignature().toTransferCRC(); }
2.周期执行一个Service 请求
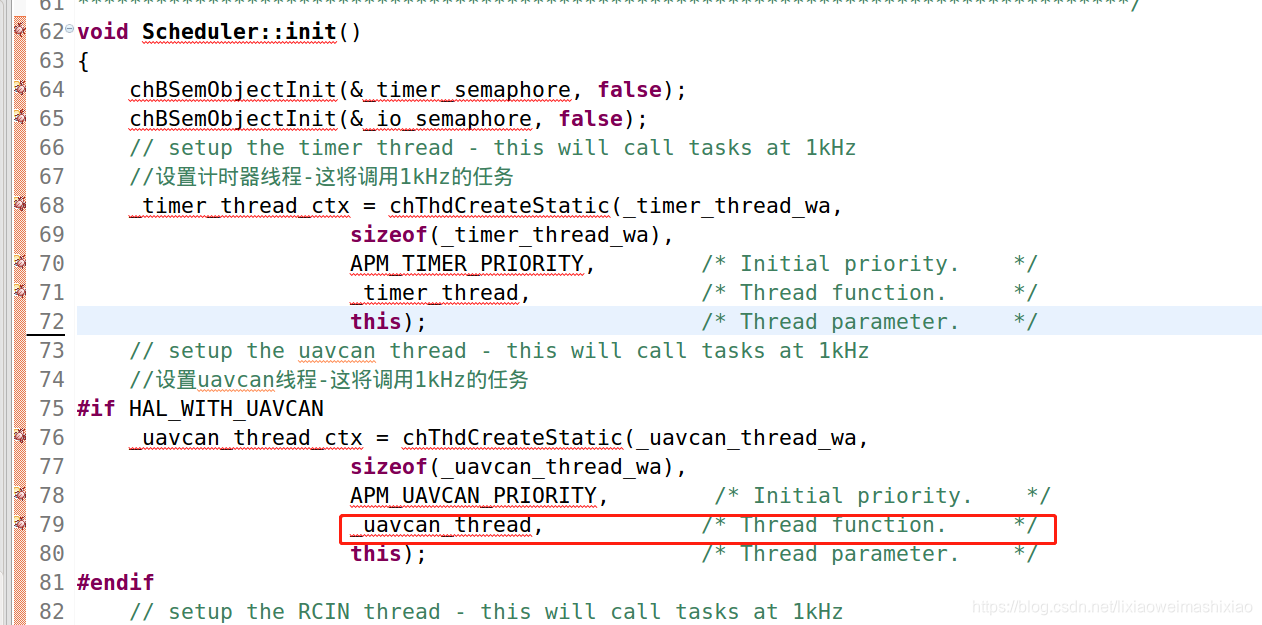
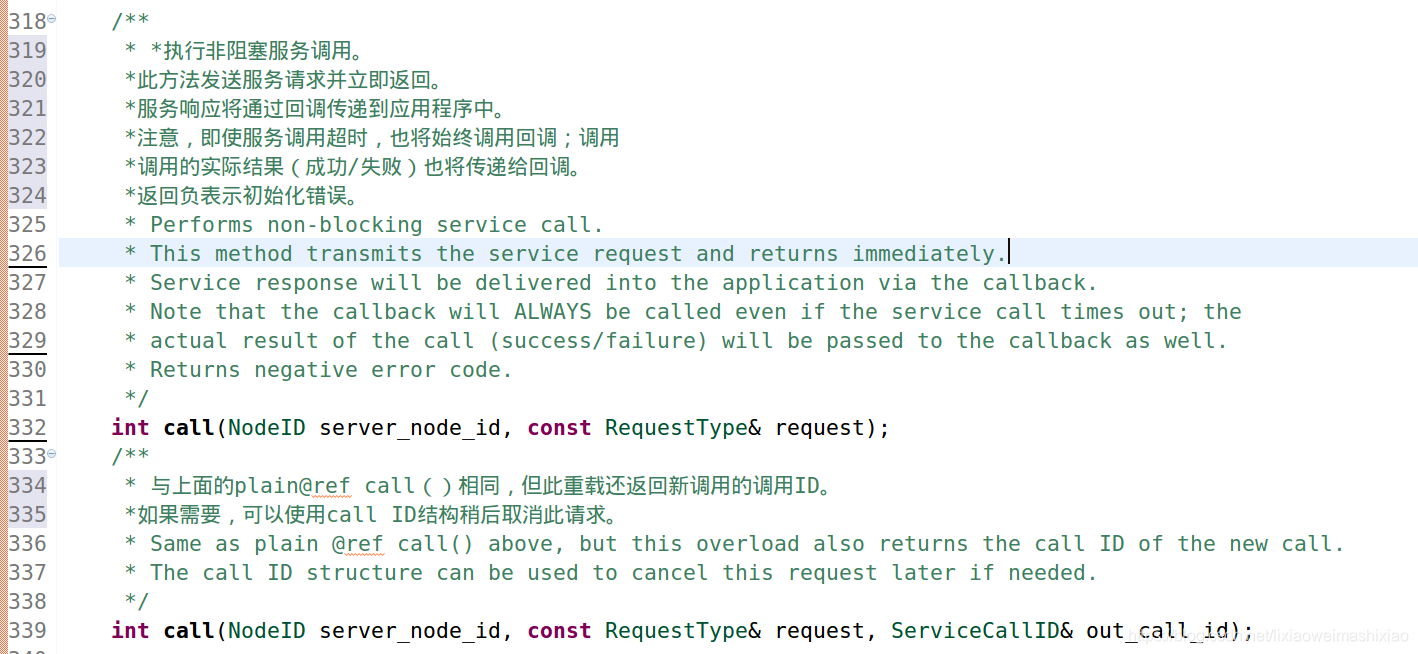
void Scheduler::_uavcan_thread(void *arg) { Scheduler *sched = (Scheduler *)arg; chRegSetThreadName("apm_uavcan"); while (!sched->_hal_initialized) { sched->delay_microseconds(20000); } while (true) { sched->delay_microseconds(300); for (int i = 0; i < MAX_NUMBER_OF_CAN_INTERFACES; i++) { if (AP_UAVCAN::get_uavcan(i) != nullptr) { //调用定时器函数 CANManager::from(hal.can_mgr[i])->_timer_tick(); } } } } void CANManager::_timer_tick() { if (!initialized_) return; if (p_uavcan != nullptr) { p_uavcan->do_cyclic(); //循环处理 } } void AP_UAVCAN::do_cyclic(void) { static uint8_t count=0; if (!_initialized) { hal.scheduler->delay_microseconds(1000); return; } //获取结点 auto *node = get_node(); count++; if(count>=20) { //设置服务节点是1 uavcan::NodeID service_res_node_id(1); uavcan::protocol::Led::Request request; request.option=1; request.color=1; request.blink=0; //直接调用 Led_Ctrl_client[0]->call(service_res_node_id,request); count=0; } //开始执行 const int error = node->spin(uavcan::MonotonicDuration::fromMSec(1)); //获取解析数据 if (error < 0) { hal.scheduler->delay_microseconds(100); return; } ...... 此处省略 ...... } 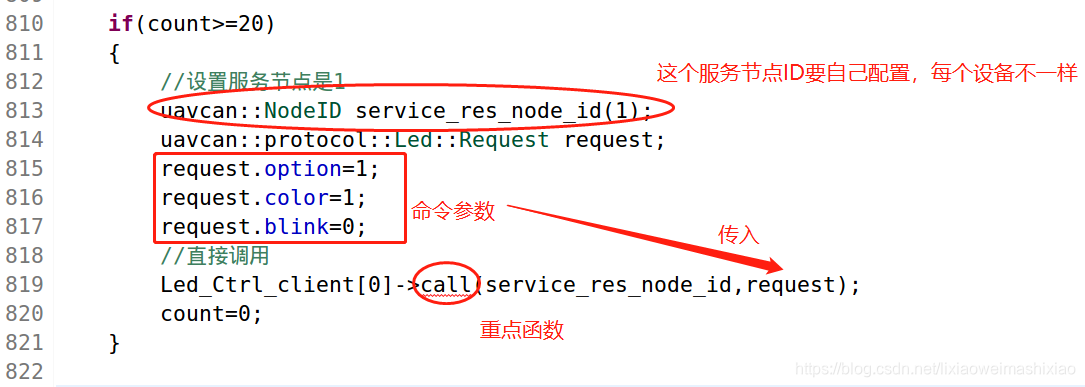
Led_Ctrl_client[0]->call(service_res_node_id,request); 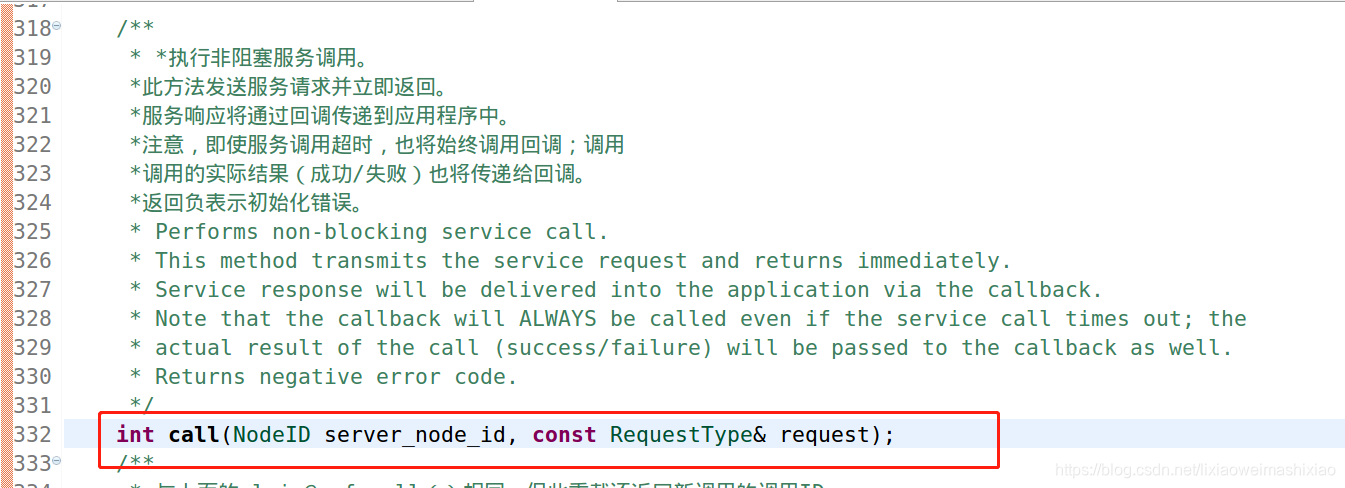
这个函数传入了两个参数,第一个是服务节点ID,第二个是客户端请求的带的参数对象

template <typename DataType_, typename Callback_> int ServiceClient<DataType_, Callback_>::call(NodeID server_node_id, const RequestType& request, ServiceCallID& out_call_id) { if (!coerceOrFallback<bool>(callback_, true)) { printf("Invalid callbackrn"); UAVCAN_TRACE("ServiceClient", "Invalid callback"); return -ErrInvalidConfiguration; } /* * 不依赖于结构数据类型的公共过程 * Common procedures that don't depend on the struct data type */ const int prep_res =prepareToCall(SubscriberType::getNode(), DataType::getDataTypeFullName(), server_node_id, out_call_id); if (prep_res < 0) { UAVCAN_TRACE("ServiceClient", "Failed to prepare the call, error: %i", prep_res); return prep_res; } /* * Initializing the call state - this will start the subscriber ad-hoc * 初始化呼叫状态-这将临时启动订户 */ const int call_state_res = addCallState(out_call_id); if (call_state_res < 0) { UAVCAN_TRACE("ServiceClient", "Failed to add call state, error: %i", call_state_res); return call_state_res; } /* * 配置侦听器以便它只接受匹配的响应 * TODO移动到init(),但这需要对GenericSubscriber进行一些重构<>(删除TransferForwarder) * Configuring the listener so it will accept only the matching responses * TODO move to init(), but this requires to somewhat refactor GenericSubscriber<> (remove TransferForwarder) */ TransferListenerWithFilter* const tl = SubscriberType::getTransferListener(); if (tl == UAVCAN_NULLPTR) { UAVCAN_ASSERT(0); // Must have been created cancelCall(out_call_id); return -ErrLogic; } tl->installAcceptanceFilter(this); /* *发布请求------Publishing the request */ const int publisher_res = publisher_.publish(request, TransferTypeServiceRequest, server_node_id, out_call_id.transfer_id); if (publisher_res < 0) { cancelCall(out_call_id); return publisher_res; } UAVCAN_ASSERT(server_node_id == out_call_id.server_node_id); return publisher_res; }
1.callback_函数
Led_Ctrl_client[driver_index]->setCallback(led_ctrl_Info); 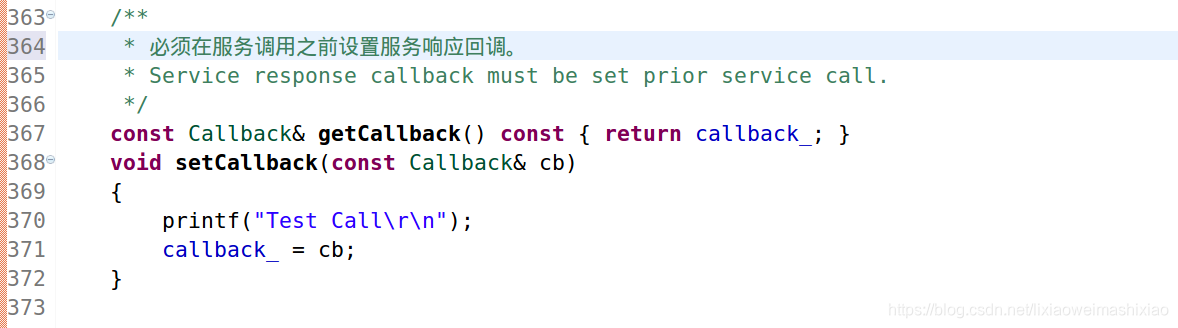
从这里可以看出callback_指的就是led_ctrl_Info()函数。
2.prepareToCall()函数
const int prep_res =prepareToCall(SubscriberType::getNode(), DataType::getDataTypeFullName(), server_node_id, out_call_id);
int ServiceClientBase::prepareToCall(INode& node, const char* dtname, NodeID server_node_id, ServiceCallID& out_call_id) int ServiceClientBase::prepareToCall(INode& node, const char* dtname, NodeID server_node_id, ServiceCallID& out_call_id) { /* * 确保不会因为输入数据无效而导致传输错误 * Making sure we're not going to get transport error because of invalid input data */ //判断服务节点是不是非广播,服务节点等于NODE ID吗 if (!server_node_id.isUnicast() || (server_node_id == node.getNodeID())) { UAVCAN_TRACE("ServiceClient", "Invalid Server Node ID"); return -ErrInvalidParam; } //参数传递 out_call_id.server_node_id = server_node_id; /* * 确定数据类型ID * Determining the Data Type ID */ if (data_type_descriptor_ == UAVCAN_NULLPTR) { GlobalDataTypeRegistry::instance().freeze(); //查找到我们定义的.uavcan名字 data_type_descriptor_ = GlobalDataTypeRegistry::instance().find(DataTypeKindService, dtname); if (data_type_descriptor_ == UAVCAN_NULLPTR) { UAVCAN_TRACE("ServiceClient", "Type [%s] is not registered", dtname); return -ErrUnknownDataType; } UAVCAN_TRACE("ServiceClient", "Data type descriptor inited: %s", data_type_descriptor_->toString().c_str()); } UAVCAN_ASSERT(data_type_descriptor_ != UAVCAN_NULLPTR); /* * 确定传输ID * Determining the Transfer ID */ const OutgoingTransferRegistryKey otr_key(data_type_descriptor_->getID(), TransferTypeServiceRequest, server_node_id); const MonotonicTime otr_deadline = node.getMonotonicTime() + TransferSender::getDefaultMaxTransferInterval(); TransferID* const otr_tid = node.getDispatcher().getOutgoingTransferRegistry().accessOrCreate(otr_key, otr_deadline); if (!otr_tid) { UAVCAN_TRACE("ServiceClient", "OTR access failure, dtd=%s", data_type_descriptor_->toString().c_str()); return -ErrMemory; } out_call_id.transfer_id = *otr_tid; otr_tid->increment(); return 0; }
3.发布请求函数
const int publisher_res = publisher_.publish(request, TransferTypeServiceRequest, server_node_id, out_call_id.transfer_id); 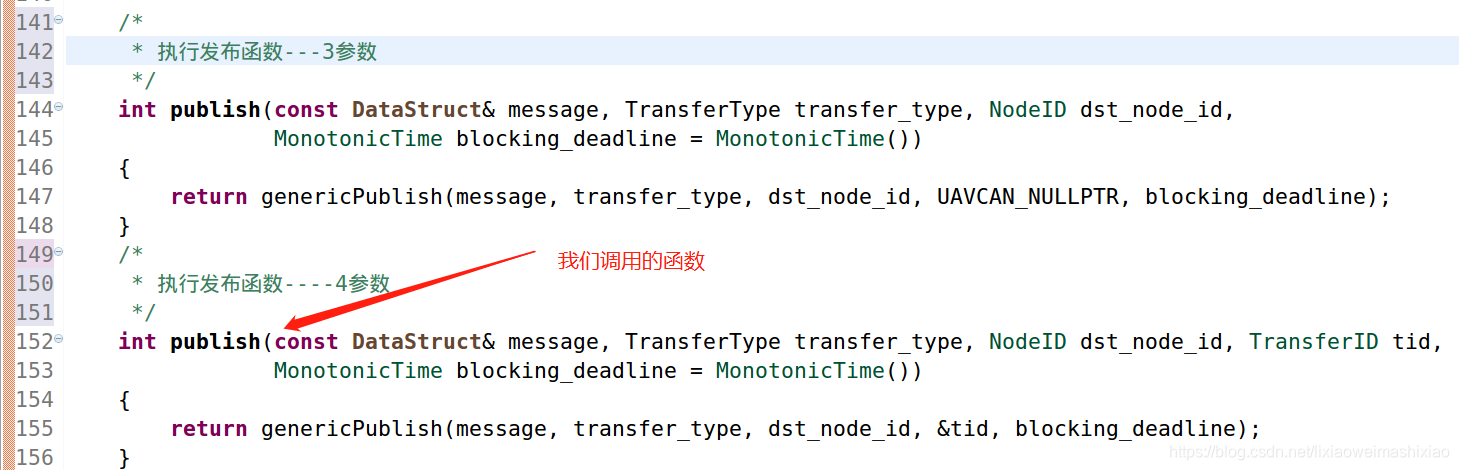
template <typename DataSpec, typename DataStruct> int GenericPublisher<DataSpec, DataStruct>::genericPublish(const DataStruct& message, TransferType transfer_type, NodeID dst_node_id, TransferID* tid, MonotonicTime blocking_deadline) { const int res = checkInit(); if (res < 0) { return res; } Buffer buffer; const int encode_res = doEncode(message, buffer); if (encode_res < 0) { return encode_res; } return GenericPublisherBase::genericPublish(buffer, transfer_type, dst_node_id, tid, blocking_deadline); } int GenericPublisherBase::genericPublish(const StaticTransferBufferImpl& buffer, TransferType transfer_type, NodeID dst_node_id, TransferID* tid, MonotonicTime blocking_deadline) { /* * tid必须不等于0,我们执行if */ if (tid) { return sender_.send(buffer.getRawPtr(), buffer.getMaxWritePos(), getTxDeadline(), blocking_deadline, transfer_type, dst_node_id, *tid); } else { return sender_.send(buffer.getRawPtr(), buffer.getMaxWritePos(), getTxDeadline(), blocking_deadline, transfer_type, dst_node_id); } } 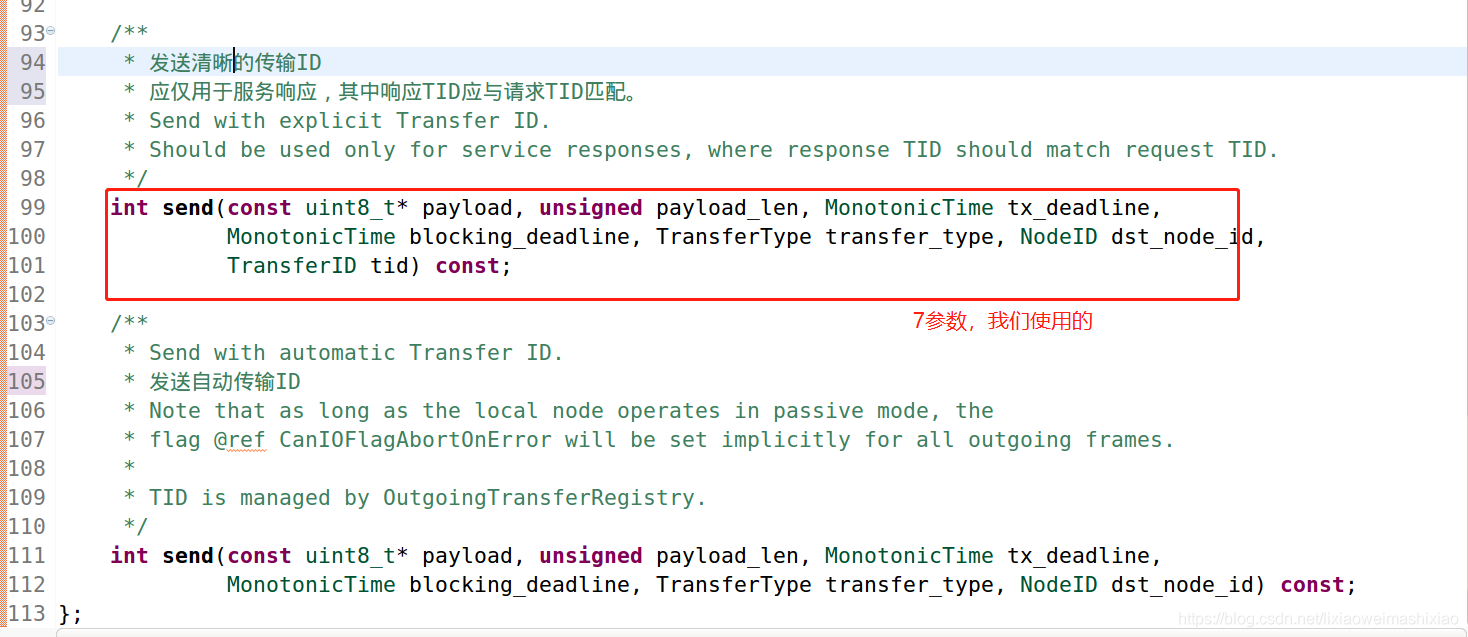
int TransferSender::send(const uint8_t* payload, unsigned payload_len, MonotonicTime tx_deadline, MonotonicTime blocking_deadline, TransferType transfer_type, NodeID dst_node_id, TransferID tid) const { Frame frame(data_type_id_, transfer_type, dispatcher_.getNodeID(), dst_node_id, tid); frame.setPriority(priority_); frame.setStartOfTransfer(true); UAVCAN_TRACE("TransferSender", "%s", frame.toString().c_str()); /* * Checking if we're allowed to send. * In passive mode we can send only anonymous transfers, if they are enabled. */ if (dispatcher_.isPassiveMode()) { const bool allow = allow_anonymous_transfers_ && (transfer_type == TransferTypeMessageBroadcast) && (int(payload_len) <= frame.getPayloadCapacity()); if (!allow) { return -ErrPassiveMode; } } dispatcher_.getTransferPerfCounter().addTxTransfer(); /* *发送结构---- Sending frames */ if (frame.getPayloadCapacity() >= payload_len) // Single Frame Transfer { const int res = frame.setPayload(payload, payload_len); if (res != int(payload_len)) { UAVCAN_ASSERT(0); UAVCAN_TRACE("TransferSender", "Frame payload write failure, %i", res); registerError(); return (res < 0) ? res : -ErrLogic; } frame.setEndOfTransfer(true); UAVCAN_ASSERT(frame.isStartOfTransfer() && frame.isEndOfTransfer() && !frame.getToggle()); const CanIOFlags flags = frame.getSrcNodeID().isUnicast() ? flags_ : (flags_ | CanIOFlagAbortOnError); //发送出去 return dispatcher_.send(frame, tx_deadline, blocking_deadline, qos_, flags, iface_mask_); } else // Multi Frame Transfer { UAVCAN_ASSERT(!dispatcher_.isPassiveMode()); UAVCAN_ASSERT(frame.getSrcNodeID().isUnicast()); int offset = 0; { TransferCRC crc = crc_base_; crc.add(payload, payload_len); static const int BUFLEN = sizeof(static_cast<CanFrame*>(0)->data); uint8_t buf[BUFLEN]; buf[0] = uint8_t(crc.get() & 0xFFU); // Transfer CRC, little endian buf[1] = uint8_t((crc.get() >> 8) & 0xFF); (void)copy(payload, payload + BUFLEN - 2, buf + 2); const int write_res = frame.setPayload(buf, BUFLEN); if (write_res < 2) { UAVCAN_TRACE("TransferSender", "Frame payload write failure, %i", write_res); registerError(); return write_res; } offset = write_res - 2; UAVCAN_ASSERT(int(payload_len) > offset); } int num_sent = 0; while (true) { const int send_res = dispatcher_.send(frame, tx_deadline, blocking_deadline, qos_, flags_, iface_mask_); if (send_res < 0) { registerError(); return send_res; } num_sent++; if (frame.isEndOfTransfer()) { return num_sent; // Number of frames transmitted } frame.setStartOfTransfer(false); frame.flipToggle(); UAVCAN_ASSERT(offset >= 0); const int write_res = frame.setPayload(payload + offset, payload_len - unsigned(offset)); if (write_res < 0) { UAVCAN_TRACE("TransferSender", "Frame payload write failure, %i", write_res); registerError(); return write_res; } offset += write_res; UAVCAN_ASSERT(offset <= int(payload_len)); if (offset >= int(payload_len)) { frame.setEndOfTransfer(true); } } } UAVCAN_ASSERT(0); return -ErrLogic; // Return path analysis is apparently broken. There should be no warning, this 'return' is unreachable. } int Dispatcher::send(const Frame& frame, MonotonicTime tx_deadline, MonotonicTime blocking_deadline, CanTxQueue::Qos qos, CanIOFlags flags, uint8_t iface_mask) { if (frame.getSrcNodeID() != getNodeID()) { UAVCAN_ASSERT(0); return -ErrLogic; } CanFrame can_frame; //形成CAN协议数据格式类型 if (!frame.compile(can_frame)) { UAVCAN_TRACE("Dispatcher", "Unable to send: frame is malformed: %s", frame.toString().c_str()); UAVCAN_ASSERT(0); return -ErrLogic; } //准备发送出去 return canio_.send(can_frame, tx_deadline, blocking_deadline, iface_mask, qos, flags); } frame.compile(can_frame) bool Frame::compile(CanFrame& out_can_frame) const { if (!isValid()) { UAVCAN_ASSERT(0); // This is an application error, so we need to maximize it. return false; } /* *CAN ID字段------ CAN ID field */ //获取CAN ID out_can_frame.id = CanFrame::FlagEFF | bitpack<0, 7>(src_node_id_.get()) | bitpack<24, 5>(transfer_priority_.get()); //判断数据帧的类型 if (transfer_type_ == TransferTypeMessageBroadcast) { out_can_frame.id |= bitpack<7, 1>(0U) | bitpack<8, 16>(data_type_id_.get()); } else { const bool request_not_response = transfer_type_ == TransferTypeServiceRequest; out_can_frame.id |= bitpack<7, 1>(1U) | bitpack<8, 7>(dst_node_id_.get()) | bitpack<15, 1>(request_not_response ? 1U : 0U) | bitpack<16, 8>(data_type_id_.get()); } /* *有效帧----- Payload */ uint8_t tail = transfer_id_.get(); //还记得刚开始说的这个tail吗 if (start_of_transfer_) { tail |= (1U << 7); } if (end_of_transfer_) { tail |= (1U << 6); } if (toggle_) { tail |= (1U << 5); } UAVCAN_ASSERT(payload_len_ < sizeof(static_cast<CanFrame*>(UAVCAN_NULLPTR)->data)); out_can_frame.dlc = static_cast<uint8_t>(payload_len_); (void)copy(payload_, payload_ + payload_len_, out_can_frame.data); out_can_frame.data[out_can_frame.dlc] = tail; out_can_frame.dlc++; /* * Discriminator鉴别器 */ if (src_node_id_.isBroadcast()) { TransferCRC crc; crc.add(out_can_frame.data, out_can_frame.dlc); //value_ = uint16_t(uint16_t((value_ << 8) ^ Table[uint16_t((value_ >> 8) ^ byte) & 0xFFU]) & 0xFFFFU); out_can_frame.id |= bitpack<10, 14>(crc.get() & ((1U << 14) - 1U)); } return true; } canio_.send(can_frame, tx_deadline, blocking_deadline, iface_mask, qos, flags) int CanIOManager::send(const CanFrame& frame, MonotonicTime tx_deadline, MonotonicTime blocking_deadline, uint8_t iface_mask, CanTxQueue::Qos qos, CanIOFlags flags) { const uint8_t num_ifaces = getNumIfaces(); const uint8_t all_ifaces_mask = uint8_t((1U << num_ifaces) - 1); iface_mask &= all_ifaces_mask; if (blocking_deadline > tx_deadline) { blocking_deadline = tx_deadline; } int retval = 0; while (true) // Somebody please refactor this. { if (iface_mask == 0) { break; } CanSelectMasks masks; masks.write = iface_mask | makePendingTxMask(); { // Building the list of next pending frames per iface. // The driver will give them a scrutinizing look before deciding whether he wants to accept them. const CanFrame* pending_tx[MaxCanIfaces] = {}; for (int i = 0; i < num_ifaces; i++) { CanTxQueue& q = *tx_queues_[i]; if (iface_mask & (1 << i)) // I hate myself so much right now. { pending_tx[i] = q.topPriorityHigherOrEqual(frame) ? q.getTopPriorityPendingFrame() : &frame; } else { pending_tx[i] = q.getTopPriorityPendingFrame(); } } //号召选择 const int select_res = callSelect(masks, pending_tx, blocking_deadline); if (select_res < 0) { return -ErrDriver; } UAVCAN_ASSERT(masks.read == 0); } // Transmission for (uint8_t i = 0; i < num_ifaces; i++) { if (masks.write & (1 << i)) { int res = 0; if (iface_mask & (1 << i)) { if (tx_queues_[i]->topPriorityHigherOrEqual(frame)) { res = sendFromTxQueue(i); // May return 0 if nothing to transmit (e.g. expired) } if (res <= 0) { //重要函数 res = sendToIface(i, frame, tx_deadline, flags); if (res > 0) { iface_mask &= uint8_t(~(1 << i)); // Mark transmitted } } } else { res = sendFromTxQueue(i); } if (res > 0) { retval++; } } } // Timeout. Enqueue the frame if wasn't transmitted and leave. const bool timed_out = sysclock_.getMonotonic() >= blocking_deadline; if (masks.write == 0 || timed_out) { if (!timed_out) { UAVCAN_TRACE("CanIOManager", "Send: Premature timeout in select(), will try again"); continue; } for (uint8_t i = 0; i < num_ifaces; i++) { if (iface_mask & (1 << i)) { tx_queues_[i]->push(frame, tx_deadline, qos, flags); } } break; } } return retval; } int CanIOManager::sendToIface(uint8_t iface_index, const CanFrame& frame, MonotonicTime tx_deadline, CanIOFlags flags) { UAVCAN_ASSERT(iface_index < MaxCanIfaces); ICanIface* const iface = driver_.getIface(iface_index); if (iface == UAVCAN_NULLPTR) { UAVCAN_ASSERT(0); // Nonexistent interface return -ErrLogic; } const int res = iface->send(frame, tx_deadline, flags); if (res != 1) { UAVCAN_TRACE("CanIOManager", "Send failed: code %i, iface %i, frame %s", res, iface_index, frame.toString().c_str()); } if (res > 0) { counters_[iface_index].frames_tx += unsigned(res); } return res; } uavcan::int16_t CanIface::send(const uavcan::CanFrame& frame, uavcan::MonotonicTime tx_deadline, uavcan::CanIOFlags flags) { if (frame.isErrorFrame() || frame.dlc > 8) { return -ErrUnsupportedFrame; } /* * Normally we should perform the same check as in @ref canAcceptNewTxFrame(), because * it is possible that the highest-priority frame between select() and send() could have been * replaced with a lower priority one due to TX timeout. But we don't do this check because: * * - It is a highly unlikely scenario. * * - Frames do not timeout on a properly functioning bus. Since frames do not timeout, the new * frame can only have higher priority, which doesn't break the logic. * * - If high-priority frames are timing out in the TX queue, there's probably a lot of other * issues to take care of before this one becomes relevant. * * - It takes CPU time. Not just CPU time, but critical section time, which is expensive. */ CriticalSectionLocker lock; /* * Seeking for an empty slot */ uavcan::uint8_t txmailbox = 0xFF; if ((can_->TSR & bxcan::TSR_TME0) == bxcan::TSR_TME0) { txmailbox = 0; } else if ((can_->TSR & bxcan::TSR_TME1) == bxcan::TSR_TME1) { txmailbox = 1; } else if ((can_->TSR & bxcan::TSR_TME2) == bxcan::TSR_TME2) { txmailbox = 2; } else { return 0; // No transmission for you. } peak_tx_mailbox_index_ = uavcan::max(peak_tx_mailbox_index_, txmailbox); // Statistics /* * Setting up the mailbox */ bxcan::TxMailboxType& mb = can_->TxMailbox[txmailbox]; //最终把数据合并,传递到发送邮箱寄存器 if (frame.isExtended()) { //注意这个寄存器地址要王右移3位 mb.TIR = ((frame.id & uavcan::CanFrame::MaskExtID) << 3) | bxcan::TIR_IDE; } else { mb.TIR = ((frame.id & uavcan::CanFrame::MaskStdID) << 21); } if (frame.isRemoteTransmissionRequest()) { mb.TIR |= bxcan::TIR_RTR; } mb.TDTR = frame.dlc; mb.TDHR = (uavcan::uint32_t(frame.data[7]) << 24) | (uavcan::uint32_t(frame.data[6]) << 16) | (uavcan::uint32_t(frame.data[5]) << 8) | (uavcan::uint32_t(frame.data[4]) << 0); mb.TDLR = (uavcan::uint32_t(frame.data[3]) << 24) | (uavcan::uint32_t(frame.data[2]) << 16) | (uavcan::uint32_t(frame.data[1]) << 8) | (uavcan::uint32_t(frame.data[0]) << 0); mb.TIR |= bxcan::TIR_TXRQ; // Go. /* * Registering the pending transmission so we can track its deadline and loopback it as needed */ TxItem& txi = pending_tx_[txmailbox]; txi.deadline = tx_deadline; txi.frame = frame; txi.loopback = (flags & uavcan::CanIOFlagLoopback) != 0; txi.abort_on_error = (flags & uavcan::CanIOFlagAbortOnError) != 0; txi.pending = true; return 1; } 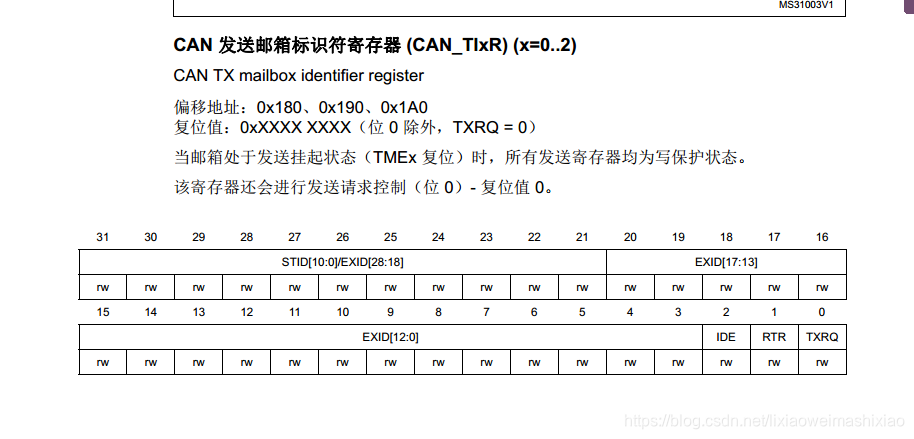
3.CAN调试方法
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)









