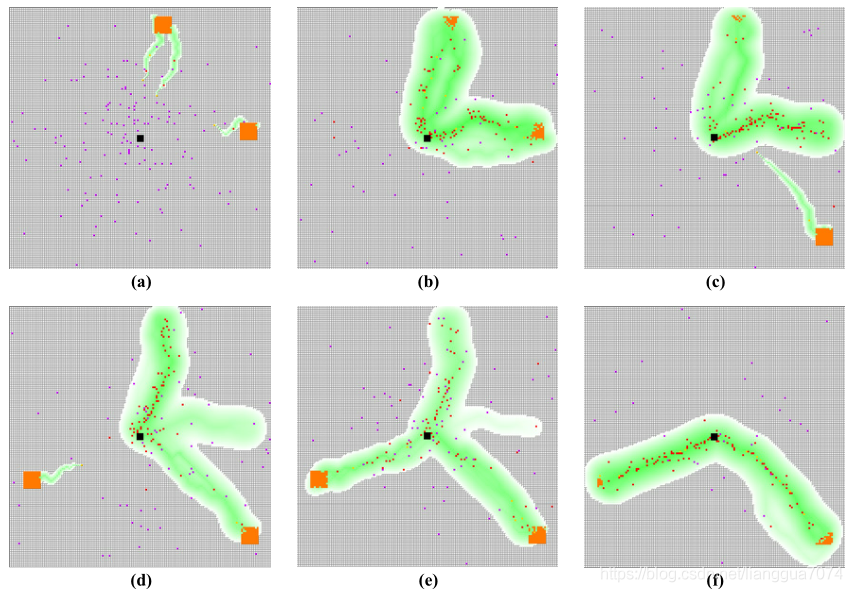
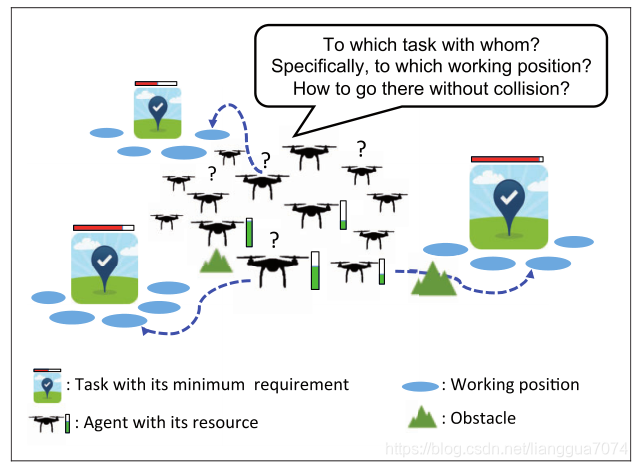
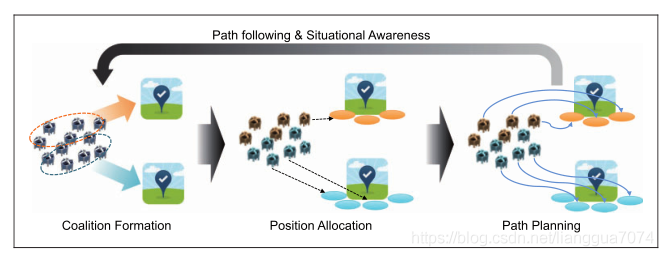
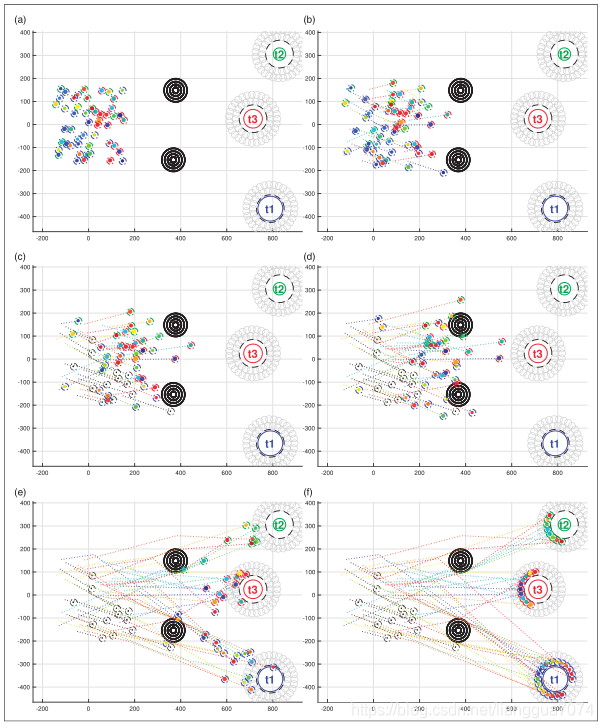
当前限制无人平台发展的技术瓶颈有:1、通信。带宽窄、自组网络难以达成、对wifi、4g或者zigbee的基站要求高,无法实现完全脱离中心通信的问题,这也是实现无人集群自主zz的关键问题。2、能源。目前小型无人平台的飞行时间基本在1h以下,多为半个小时,这与无人平台的耗能大、能源技术有限都有关,这也限制了无人平台可携带负载、可覆盖区域、可处理计算等能力。3、自主性和智能性。当前的无人平台智能还处于初级阶段,主要解决自主避碰和编队等基本问题,还未涉及更高级的飞行动作,态势分析能力弱,计算能力低下导致复杂算法并不能在机载计算机上实现,种种约束导致了当前无人平台自主智能。 当前5G技术的发展将会助力物联网时代的到来,也是无人时代的到来,极大可能解决不依托固定基站的无人平台自组织网络的构建问题。能源技术也在不断发展,新能源汽车的快速发展也代表未来将会有更多的电力充电站、电池技术也将更加成熟,如果同样大小的电池能够提供更多电能,将极大解放无人集群的能力边界。人工智能是当代最热门的IT领域,图像识别能力、数据分析能力都在不断提升,里程碑式出现了alphaGo,alphaZero等打败人类最高围棋水平的人工智能,同时在机器人、飞行器制作等方面的技术也在不断提升,实现特技飞行、携带机枪等武器的无人平台也已有了原型机。这些技术的发展趋势将会很好的解决当前制约无人平台的几个难点。 感兴趣的可以看看在电影《蜘蛛侠2》中的无人机应用模式。(链接传送) 本文针对异构群体机器人协作任务分配这一关键科学问题找了强相关的最新研究,给同领域的各位,欢迎批评指正和交流~ 在群体机器人系统中,任务分配问题一直是一个具有挑战性的问题。本文研究了多机器人在给定时间范围内并行采集多个目标的动态任务分配问题。提出了一种无需机器人间通信的响应阈值模型分散策略。在这里,我们为每个机器人引入了一个任务选择概率函数,以平衡任务需求和执行任务的机器人。该方法通过改变任务选择概率函数中给定的响应阈值,可以产生任务的变化趋势。使用此属性,每个机器人可以通过调整响应阈值在所有可用任务中选择自己的任务。这最终会在组级别促进所需的任务分布,并减少任务更改的数量。我们的方法建议根据最近观察到的物体和邻近机器人在周围区域观察到的任务来更新机器人的响应阈值。我们提供了一个收敛性分析,即系统可以随机收敛到期望任务分布的平衡点。即使只有局部的环境信息被赋予个体机器人,这种方法也是有效的。通过对多机器人执行觅食任务的仿真,验证了该方法的有效性,并给出了一个动态的任务分配过程。 我们提出了一种新的蚁群优化算法应用于有效地将一组齐次机器人分配给一组需要在特定期限内完成的任务。我们利用机器人之间的局部通信来周期性地评估分配方案的质量,并且智能体在高质量的方案中独立选择。使用信息素跟踪进行评估,以支持最小化任务执行时间的分配。我们的方法在静态和动态环境(即任务可用性随时间而变化)中使用不同的基于物理的模拟集进行了验证。 在群体机器人系统中,协调行为是通过机器人之间以及机器人与环境之间的局部交互而产生的。对于在封闭区域内执行一组预先定义的任务的机器人群,本文提出了一种分散机制,利用机器人在区域内移动时发生的空间交互,将任务分配给每个机器人。为了获得执行每项任务所需的群体百分比,开发的策略允许个体机器人在区域内遇到其他机器人时,以一定的概率在不同任务之间切换。我们利用Enskog稠密气体理论的思想,建立了一个分析模型来描述在稠密的机器人群中发生的机器人间相遇,并说明了群体如何利用这个模型来达到所需的分配水平。此外,机器人之间的相遇使机器人能够测量当前的温度分配,而温度的分配是使用或调节的在任务之间切换。这个根据当前分配与所需值之间的距离,允许软件接受或降低任务之间的传输速率,最终促进不间断任务由机器人执行。本文介绍的方法说明了如何利用群体中机器人之间自然发生的相遇,以闭环的方式将任务分配给机器人。所开发的算法是完全分散的,可以部署到最小的机器人上,以满足通信的需要。在一组实际机器人上验证了该算法的性能。 本文提出了一个任务分配模型,用于在一群觅食机器人中自动调整工作机器人的数量。在群体觅食中,觅食区的交通拥挤和机器人之间的物理干扰会显著降低群体的性能。首次引入交通流密度的概念,用以反映觅食区的交通状况。避障量是指群体觅食过程中产生的物理干扰次数。交通流密度和避障量共同调整阈值。在提出的响应阈值sigmoid模型(RTSM)中,个体机器人可以根据阈值和外部刺激自主决定是否觅食,群体系统可以完成预期的觅食任务。为了评价该方法的性能,进行了仿真实验。介绍了几种性能指标对实验结果进行分析,并与自适应响应阈值模型(ARTM)进行了比较。实验结果表明,RTSM提高了觅食效率,减少了物理干扰。 群体机器人学是一个多机器人在没有任何形式的集中控制的情况下,自主地协调集体行为以完成给定任务的领域。在群体机器人中,任务分配是指机器人在不同的子任务上动态分布的行为,这是解决复杂任务所必需的。进化机器人技术是发展机器人群体集体行为的一种很有前途的方法。然而,人工进化常常会遇到两个问题:自举问题和欺骗问题,特别是当底层任务非常复杂时。为了克服这些困难,本文提出了一种由任务划分和自主任务分配两步组成的方案。我们进行了计算机模拟实验,其中机器人群必须完成一个复杂的集体觅食问题,结果表明,所提出的方法比传统的进化机器人方法更有效。 提出了一种基于响应阈值模型的可扩展群体机器人系统局部交互自主角色分配和任务分配方法。响应阈值描述了蚂蚁对信息素的敏感性。在现实生活中,存在着信息素敏感性高和低的蚂蚁。蚂蚁的信息素敏感性与自主角色分配和任务分配有关。在传统的响应阈值模型中,假设一只蚂蚁可以获得蚁群中所有工人的数量。然而,蚂蚁的功能非常有限,很难获得和处理所有的工作人员。因此,我们使用一个响应阈值模型,该模型引用所遇到的觅食蚂蚁的数量,而不是所有工作人员的数量。在本研究中,我们将所提出的方法应用于蚁群觅食问题,并展示了所提出方法在动态环境下的稳健性。 在多任务空间分布的协同任务环境下,空中机器人群的决策问题包括团队组建、团队对任务分配、agent对工作位置分配和避免碰撞的轨迹优化。当涉及到异构智能体、任务的最小需求和公平分配时,问题变得更加复杂。本文将所有的组合问题列为一个优化问题,然后提出一个以分散方式解决问题的集成框架。我们将复杂的原始问题近似分解为三个子问题(即联盟形成、位置分配和路径规划),这些子问题由三个不同的模块依次处理。以博弈论为基础的联盟形成模块处理一个最大-最小问题,其目标是将代理划分成不相交的任务特定团队,使代理的工作资源与任务的最小工作量要求成比例。对于分配给同一任务的代理,在合理的假设下,位置分配子问题可以从计算复杂度的角度得到有效的解决。在轨迹优化方面,我们采用了模型预测控制和序列凸规划算法,减小了问题的规模,使智能体能够实时生成无碰撞的轨迹。作为概念验证,将该框架应用于无人机群协同待命干扰任务场景中,通过数值实验验证了其可行性、容错性和近似最优性。
异构群体机器人协作任务分配(群体智能论文学习)
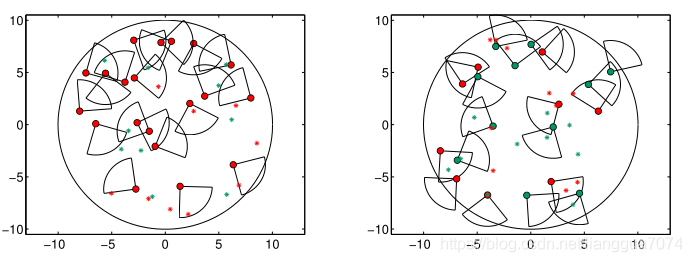
Adaptive Approach to Regulate Task Distribution in Swarm Robotic Systems(群体机器人系统任务分配的自适应调节方法),Swarm and Evolutionary Computation,10 November 2018
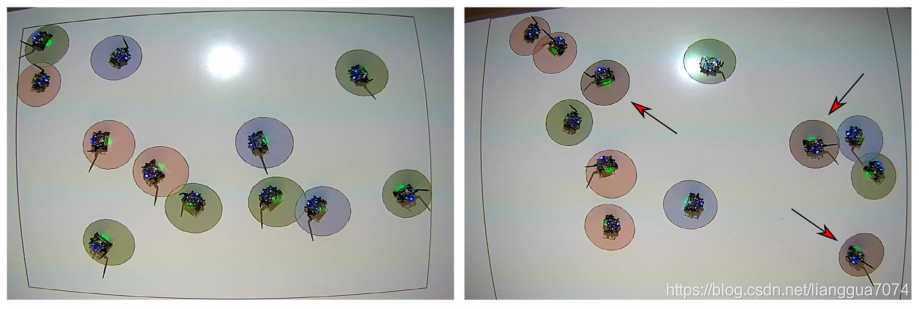
评述:该文章探讨了两类机器人(红绿,完成对应颜色的觅食任务),实验分析比较完善,但运动模型、任务模型、通信模型建立偏简单,有较大改进空间。Local ant system for allocating robot swarms to time-constrained tasks(面向时间约束任务的局部蚁群算法),Journal of Computational Science 31 (2019) 33–44

评述:缺乏对照实验,只是针对自己工作不同的参数配置来进行实验分析;缺乏实机实验。Closed-loop task allocation in robot swarms using inter-robot(基于机器人相遇的机器人群闭环任务分配)Swarm Intelligence (2019)
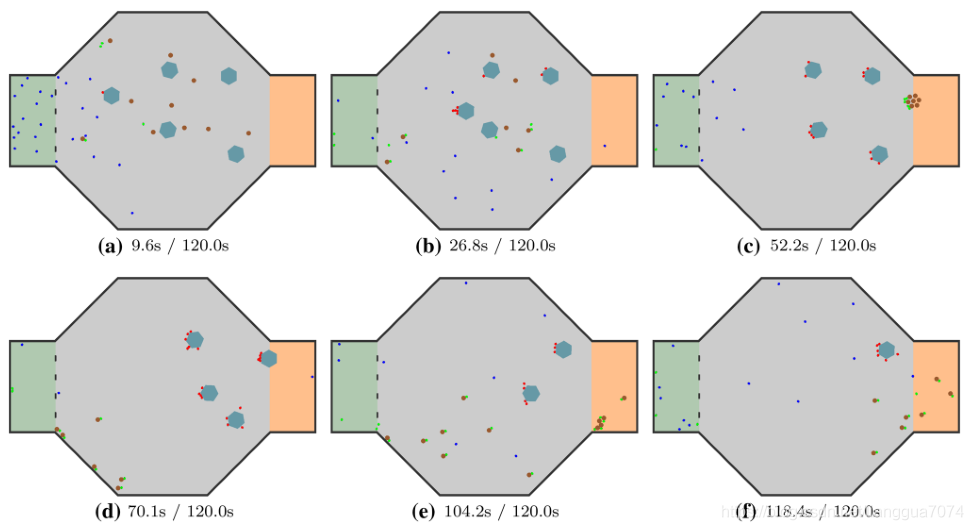
Autonomous Task Allocation in a Swarm of Foraging Robots: An Approach Based on Response Threshold Sigmoid Model(基于响应阈值Sigmoid模型的觅食机器人群体自主任务分配)International Journal of Control, Automation and Systems,2019
Autonomous task allocation by artificial evolution for robotic swarms in complex tasks(复杂任务中机器人群的人工进化自主任务分配)Artificial Life and Robotics ,2018

Autonomous role assignment and task allocation in scalable swarm robotic systems using local interactions(基于局部交互的可扩展群体机器人系统中的自主角色分配与任务分配)Artificial Life and Robotics ,2018
An integrated decision-making framework of a heterogeneous aerial robotic swarm for cooperative tasks with minimum requirements(异构空中机器人群最小需求协同任务的集成决策框架)Journal of Aerospace Engineering,2018
欢迎大家、评论、、关注~
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)









 746
746