备注:
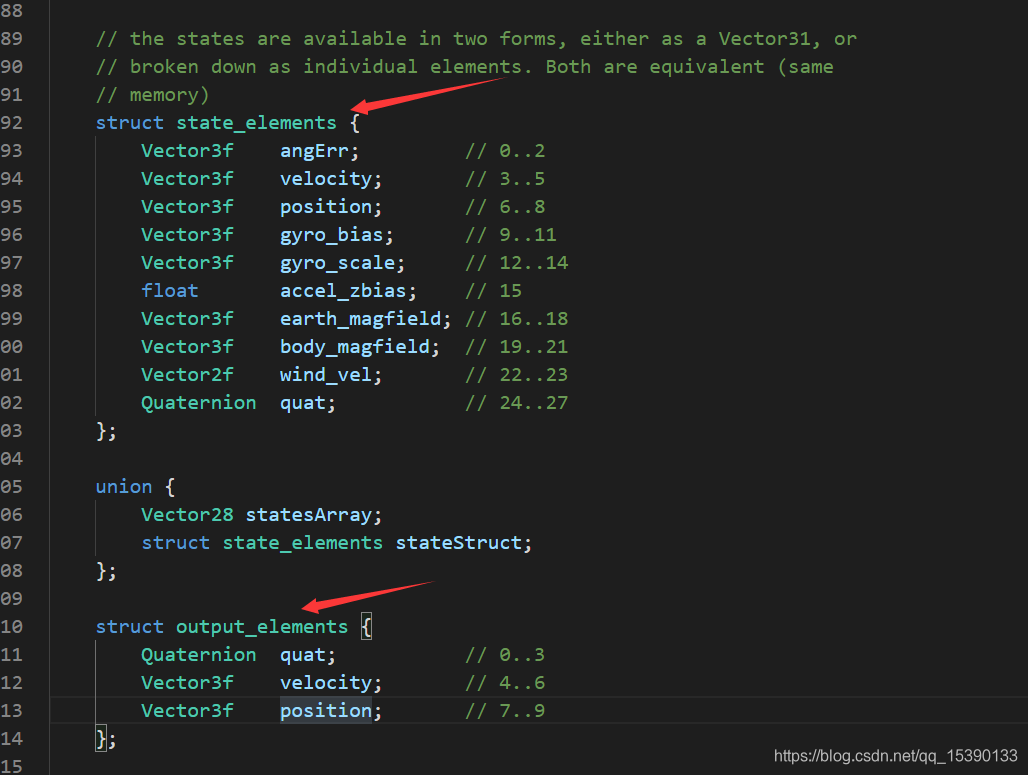
绝对是ArduPilot 的一大亮点,28个状态量,10个输出量。如下图所示:
下图为EKF作者的GitHub网站截图。
这部分内容工作量太大了,看的一头雾水。目前先把关注点放在输入输出上。
1. 输出的有融合校正后的四元数,速度,以及位置。
2. 该方法基于陀螺仪,加速度计,罗盘,GPS,空速计,气压计估计出机体位置,速度以及旋转。
3. ArduPilot中先找出硬件中存在几组IMU,然后分别进行EKF,最后判断启用那组融合结果。达到冗余控制的效果。
参考:九天揽月带你玩转Ardupilot 的EKF2纸老虎(1)
牢记公式,ardupilot EKF2就是纸老虎(一)!
牢记公式,ardupilot EKF2就是纸老虎(二)!
牢记公式,ardupilot EKF2就是纸老虎(三)!
牢记公式,ardupilot EKF2就是纸老虎(四)!
牢记公式,ardupilot EKF2就是纸老虎(五)!
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)









