在2D目标跟踪任务中,我们需要从精度、鲁棒性、运行速度等方面对算法进行综合评估。首先介绍单目标跟踪(SOT)算法的常用评估指标;其次介绍多目标跟踪(MOT)算法的常用评估指标。 定义:序列中跟踪成功的帧数占总帧数的比例定义为跟踪成功率,选取不同的阈值,则可以得到各阈值下的成功率,连接各点形成success曲线 用途:根据曲线下的面积来衡量tracker的跟踪精确度 对于多目标跟踪问题,一个理想的评价指标应该满足下述三点要求: 为了满足上述要求,论文提出了一种系统、客观的评价过程。假设每一帧图像中有目标O={o1,o2,…,on},tracker在该帧输出的假设为H={h1,h2,…,hm},那么评价过程包含以下步骤: 1. 建立目标和假设间的最优一一对应关系 2. 对所有的目标-假设对应,计算位置偏移误差 3. 计算累积误差:误检、漏检、跟踪目标发生跳变等 由此可以定义以下评估指标。
单目标跟踪
APE(Average Pixel Error)
AOR(Average Overlap Rate)

Pixel Error threshold
Overlap Rate threshold
Success plot

以Pixel Error threshold为横坐标,以跟踪成功率为纵坐标:像素误差-成功率图 以Overlap Rate threshold为横坐标,以跟踪成功率为纵坐标:重叠率-成功率图TRE(Temporal Robustness Evaluation)
以OTB对时间鲁棒性的测试为例: 1)将视频序列在时间轴上平均找出20个点作为起点,终点还是原来的最后一帧,形成20段视频序列 2)对20段视频序列运行算法(使用ground-truth进行初始化),得到每段视频的APE或AOR 3)绘制平均像素误差(APE)图或者平均重叠率(AOR)图 4)时间鲁棒性测试完成SRE(Spatial Robustness Evaluation)
以OTB对空间鲁棒性的测试为例: 1)将一段视频在第一帧以真实位置稍作偏移,即测试初始化位置有偏差的目标序列。具体方法是:以8个方向(8种空间位置上的偏移,包括4种中心偏移和4种角偏移)、4个尺度(4种尺度变化)形成12段测试序列 2)对12段视频序列运行算法,得到每段视频的跟踪成功率 3)将这12段序列的成功率绘制成曲线 4)空间鲁棒性测试完成EAO(Expect Average Overlaprate)图


EFO(Equivalent Filter Operations)
多目标跟踪
在目标和假设间,采取最近邻的方法,将相互距离最小的假设匹配给对应的目标。如果在H中假设hi与目标oj的距离最近,且两者的距离dij<T(T为距离阈值),则应该视假设hi和目标oj存在对应关系;反之若dij>T,则视假设hi和目标oj不存在对应关系,此时oj为一个漏检目标。 注:(1)若以IoU作为衡量假设与目标是否匹配的标准,则IoU应该越大越好,即IoU大于阈值时视为匹配。 (2)为了降低错误率,减少对应发生跳变的次数,可以在同一目标存在多个合理对应时,选择已经存在的对应。
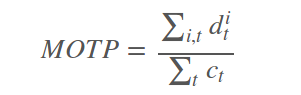
MOTP(Multiple Object Tracking Precision)
MT(Mostly Tracked)
ML (Mostly Lost)
注:这里的MT和ML与当前track的ID是否发生变化无关,只要算法输出与目标真值匹配上即可。FM(Fragmentation)
注:(1)FM与ID是否发生变化无关 (2)FM计数时要求目标的状态需要满足:tracked->untracked->tracked
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)







